yazama.net
| Sun | Mon | Tue | Wed | Thu | Fri | Sat |
|---|---|---|---|---|---|---|
| 1 | 2 | |||||
| 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| 10 | 11 | 12 | 13 | 14 | 15 | 16 |
| 17 | 18 | 19 | 20 | 21 | 22 | 23 |
| 24 | 25 | 26 | 27 | 28 | 29 | 30 |
| 31 |
2010-10-24,Sunday
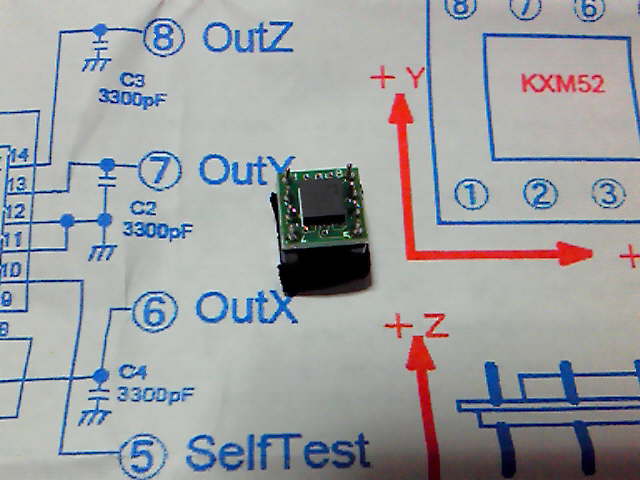
KXM52-1050

右肩に KXM52-1050 の 4番ピンが前方、1番ピンが後方となるよう両面テープで取り付けました。(X軸を使用)
■ 配線
KXM52-1050 の 1番ピンと 2番ピンを Vcc (+5V) へ、3番ピンと 5番ピンを GND へ、そして 6番ピン (X軸出力) を AD1 の S に接続します。
 00:10 -
00:10 -

GWS PG-03

左肩に PG-03 付属の両面テープで取り付けました。
ピッチ軸 (前後方向) を制御したいので LED が前方となるようにします。(後方も可)
■ 配線
PG-03 の入力コネクタを AD0 に、出力端子 (S) を自作ケーブルで AD4 に接続しました。
2010-10-23,Saturday
KXM52-1050
2010-10-20,Wednesday
GWS PG-3

HiTEC 社 の拡張ユニット HG-R001 ジャイロモジュールは定価で 7,000円ですが、秋月電子通商さんの PG-3 は半額以下です。 (3,000円で購入)
2010-10-17,Sunday
roboBASIC V2.5

Windows Vista で Windows XP のときに使っていたプログラムを動かしたい
プログラム互換性ウィザードを使いWindows XP 互換モードにします。(プログラムの画面の設定は選択なし)
これだけで roboBASIC V2.5 が Windows Vista で動くようになりました。 (丸二日も悩んだのに...)
ちなみに roboBASIC とは、ロボット制御用の専用命令を追加した BASIC (プログラミングツール) です。
2010-10-14,Thursday
ROBONOVA-I

Navigation
Search
Categories
